OPTIMASI KONTROLER PID MENGUNAKAN ALGORITMA
GENETIKA UNTUK PENGENDALIAN SISTEM OTOMATIS
KEMUDI RUDAL
GENETIKA UNTUK PENGENDALIAN SISTEM OTOMATIS
KEMUDI RUDAL
Referensi :Fedric Fernando (2017), TUGAS AKHIR: Optimasi Kontroler PID Menggunakan algoritma Genetika Untuk Pengendian Sistem Otomatis Kemudi Rudal. Jurusan Matematika : Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Teknologi Sepuluh Nopember
A. Pendahuluan
Sistem kemudi missile adalah salah satu sistem yang masih umum untuk menggunakan kontroler PID. Missile proyektil yang memiliki suatu sistem petunjuk yang mengijinkannya untuk menyetir dan merubah haluan missile tersebut untuk menuju ke suatu target. Kesulitan menggunakan kontroler ini adalah tuning parameter dari kontroler tersebut, dikarenakan optimasi ini menggunakan 3 kontroler. Banyak cara digunakan untuk mendapatkan nilai kontroler tersebut, mulai dari metode klasik hingga menggunakan evolutionary algorithm. Salah satu evolutionary algorithm adalah Algoritma genetika(GA), yang merupakan algoritma pencarian yang berbasis genetika dan sering digunakan dalam optimasi sistem.
 Gambar 1. missil sederhana
Gambar 1. missil sederhana
Sistem kemudi missile adalah salah satu sistem yang masih umum untuk menggunakan kontroler PID. Missile proyektil yang memiliki suatu sistem petunjuk yang mengijinkannya untuk menyetir dan merubah haluan missile tersebut untuk menuju ke suatu target. Kesulitan menggunakan kontroler ini adalah tuning parameter dari kontroler tersebut, dikarenakan optimasi ini menggunakan 3 kontroler. Banyak cara digunakan untuk mendapatkan nilai kontroler tersebut, mulai dari metode klasik hingga menggunakan evolutionary algorithm. Salah satu evolutionary algorithm adalah Algoritma genetika(GA), yang merupakan algoritma pencarian yang berbasis genetika dan sering digunakan dalam optimasi sistem.
Gambar 1. missil sederhana
B. Analisis Sistem Kemudi Missile
Dalam sistem kemudi missile yang sederhana, sistem kemudinya hanya terdiri dari actuators. Hydrolic actuators akan menggerakan sirip missile menuju posisi sirip yang seharusnya.Posisi sirip akan menentukan arah dari rudal tersebut.
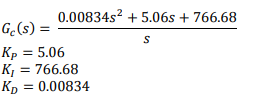
Fungsi alih sistem kemudi missile :

Pada penelitian ini akan dibandingkan metode ziegher-nichols dengan metode algoritma genetika.
C. Langkah Penyelesaian
1. Perumusan Kromosom
Dalam penelitian kali ini, gen akan berisi nilai biner, yaitu nilai biner dari nilai kontroler P, nilai kontroler I, dan nilai kontroler D, dan satu individu terdiri dari 3 kromosom (pasangan nilai P, nilai I, dan nilai D) dan individu tersebut merupakan solusi dari permasalahan yang ada dalam penelitian kali ini.
 Gambar 2. Ilustrasi Representasi Penyelesaian Permasalahan Dalam Algoritma Genetika
Gambar 2. Ilustrasi Representasi Penyelesaian Permasalahan Dalam Algoritma Genetika
2. InisialisasiDalam penelitian kali, Inisialisasi akan menggunakan Random Generator. Random Generator akan membuat nilai P, nilai I, dan nilai D secara random. Nilai P akan dirandom dari nilai 0 hingga 1001, nilai I dirandom dari 0 hingga 1001, dan nilaiD akan dirandom dari nilai 0 hingga 11.
3. EvaluasiDalam penelitian kali ini, nilai fitness akan ditentukan berdasarkan indeks performasi dari sistem. Indeks performasi akan diambil dengan berbagai cara yaitu : RMSE, MSE, ITAE, IAE, dan ISE. Setelah didapatkan indeks performasinya, nilai fitness akandidapatkan dengan cara :
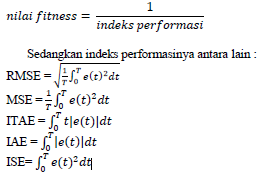
Namun, karena data yang didapat berupa diskrit, maka fungsiindeks performasi akan dirubah menjadi :
4. SeleksiSeleksi sendiri digunakan agar hanya individu terbaik yang akan menjadi induk dalam populasi berikutnya. Ada banyak cara dalam menyeleksi individu, dalam penelitian kali ini akan digunakan seleksi dengan cara mesin roullete. Selain itu, akan ditambahkan metode elitism yang akan membuat Algoritma Genetika untuk menyimpan satu nilai terbaiknya dan akan diturunkan ke dalam generasi selanjutnya.
5. ReproduksiDalam Algoritma Genetika, reproduksi terbagi mejadi 2 tugas yaitu crossover danmutasi.
5.1 CrossoverCrossover yang digunakan dalam pengerjaaan penelitian kali ini adalah crossover di banyak titik. Kromosom P, kromosom I, dan kromosom D akan dirubah menjadi biner terlebih dahulu sebelum dioperasikan. Jumlah dan posisi cut point yang digunakan akan di-random. Kromosom P induk 1 akan di-crossover dengan kromosom P induk 2. Begitu juga untuk kromosom I dan kromosom D.
5.2 MutasiDalam penelitian kali ini, mutasi dilakukan dengan cara diatas. Dengan 𝑟 akan diambil sebanyak 1 hingga sejumlah gen dalam 1 kromosom.

Gambar 3. Diagram Alir Pengerjaan Algoritma Genetika
D. Hasil Pengujian
D.1 Hasil Optimasi Dengan Metode Z-NProses ini adalah proses dimana nilai kontroler P, nilai kontroler I, dan nilai kontroler D didapatkan melalui SISO tool milik Matlab.

D.2 Hasil Optimasi Dengan Metode Algoritma Genetika
D.2.1 Hasil GA Menggunakan RMSE
D.2.2 Hasil GA Menggunakan MSE
D.2.3 Hasil GA Menggunakan ITAE
D.2.4 Hasil GA Menggunakan IAE

D.2.5 Hasil GA Menggunakan ISE
D.3 Perbandingan Hasil GA dengan Z-N

E. Kesimpulan 1. Hasil perbandingan terhadap parameter yang ditentukan menunjukan bahwa PID yang diatur dengan GA berhasil mengarahkan sistem menuju output yang diinginkan dengan waktu yang lebih cepat dibanding dengan metode Z-N.
F. Dugaan Terkait Kesimpulan PenelitianBerdasarkan diskusi yang telah dilakukan bersama bapak, kelompok kami akan terlebih dahulu menguji apakah hasil GA memang lebih baik dibandingkan metode Z-N sebab bapak menghipotesis sementara bahaw sebenarnya metode Z-N tetap lebih baik dibandingkan metode GA berdasarkan percobaan yang telah pernah bapak lakukan.
G. LINK DOWNLOADDownload File Tugas Akhir klik disini
Dalam sistem kemudi missile yang sederhana, sistem kemudinya hanya terdiri dari actuators. Hydrolic actuators akan menggerakan sirip missile menuju posisi sirip yang seharusnya.Posisi sirip akan menentukan arah dari rudal tersebut.
Fungsi alih sistem kemudi missile :
C. Langkah Penyelesaian
Dalam penelitian kali ini, gen akan berisi nilai biner, yaitu nilai biner dari nilai kontroler P, nilai kontroler I, dan nilai kontroler D, dan satu individu terdiri dari 3 kromosom (pasangan nilai P, nilai I, dan nilai D) dan individu tersebut merupakan solusi dari permasalahan yang ada dalam penelitian kali ini.
Gambar 2. Ilustrasi Representasi Penyelesaian Permasalahan Dalam Algoritma Genetika
2. Inisialisasi
Dalam penelitian kali, Inisialisasi akan menggunakan Random Generator. Random Generator akan membuat nilai P, nilai I, dan nilai D secara random. Nilai P akan dirandom dari nilai 0 hingga 1001, nilai I dirandom dari 0 hingga 1001, dan nilai
D akan dirandom dari nilai 0 hingga 11.
3. Evaluasi
Dalam penelitian kali ini, nilai fitness akan ditentukan berdasarkan indeks performasi dari sistem. Indeks performasi akan diambil dengan berbagai cara yaitu : RMSE, MSE, ITAE, IAE, dan ISE. Setelah didapatkan indeks performasinya, nilai fitness akan
didapatkan dengan cara :
Namun, karena data yang didapat berupa diskrit, maka fungsi
indeks performasi akan dirubah menjadi :
4. Seleksi
Seleksi sendiri digunakan agar hanya individu terbaik yang akan menjadi induk dalam populasi berikutnya. Ada banyak cara dalam menyeleksi individu, dalam penelitian kali ini akan digunakan seleksi dengan cara mesin roullete. Selain itu, akan ditambahkan metode elitism yang akan membuat Algoritma Genetika untuk menyimpan satu nilai terbaiknya dan akan diturunkan ke dalam generasi selanjutnya.
5. Reproduksi
Dalam Algoritma Genetika, reproduksi terbagi mejadi 2 tugas yaitu crossover dan
mutasi.
5.1 Crossover
Crossover yang digunakan dalam pengerjaaan penelitian kali ini adalah crossover di banyak titik. Kromosom P, kromosom I, dan kromosom D akan dirubah menjadi biner terlebih dahulu sebelum dioperasikan. Jumlah dan posisi cut point yang digunakan akan di-random. Kromosom P induk 1 akan di-crossover dengan kromosom P induk 2. Begitu juga untuk kromosom I dan kromosom D.
5.2 Mutasi
Dalam penelitian kali ini, mutasi dilakukan dengan cara diatas. Dengan 𝑟 akan diambil sebanyak 1 hingga sejumlah gen dalam 1 kromosom.
D. Hasil Pengujian
D.1 Hasil Optimasi Dengan Metode Z-N
Proses ini adalah proses dimana nilai kontroler P, nilai kontroler I, dan nilai kontroler D didapatkan melalui SISO tool milik Matlab.
D.2 Hasil Optimasi Dengan Metode Algoritma Genetika
D.2.1 Hasil GA Menggunakan RMSE
D.2.2 Hasil GA Menggunakan MSE
D.2.3 Hasil GA Menggunakan ITAE
D.2.4 Hasil GA Menggunakan IAE
D.2.5 Hasil GA Menggunakan ISE
D.3 Perbandingan Hasil GA dengan Z-N
E. Kesimpulan
1. Hasil perbandingan terhadap parameter yang ditentukan menunjukan bahwa PID yang diatur dengan GA berhasil mengarahkan sistem menuju output yang diinginkan dengan waktu yang lebih cepat dibanding dengan metode Z-N.
F. Dugaan Terkait Kesimpulan Penelitian
Berdasarkan diskusi yang telah dilakukan bersama bapak, kelompok kami akan terlebih dahulu menguji apakah hasil GA memang lebih baik dibandingkan metode Z-N sebab bapak menghipotesis sementara bahaw sebenarnya metode Z-N tetap lebih baik dibandingkan metode GA berdasarkan percobaan yang telah pernah bapak lakukan.
G. LINK DOWNLOAD
Download File Tugas Akhir klik disini


Tidak ada komentar:
Posting Komentar